|
|
|
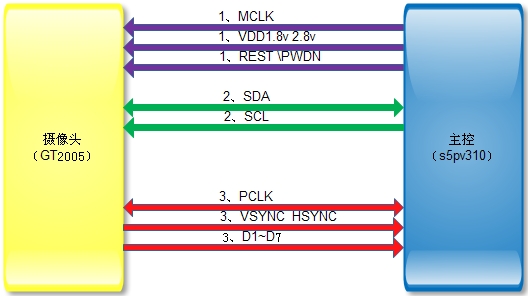
摄像头主要参数: 1、MCLK 24MHz; 2、PCLK 48~52MHz~; 3、电压 1.8V(1.5V)、2.8V; 4、scl(IIC时钟)100KHz或者400KHz。
一、摄像头驱动 我们以GT2005为例,来讲述一个摄像头驱动的调试过程: 摄像头和主控的关系图,如下:
摄像头驱动比较简单,完成一面三大步就可以:
摄像头的上电、时钟这些基本条件;
IIC保证摄像头的初始化;
摄像头工作后传回数据到主控。
完成这三个步骤就完成了摄像头基本工作的调试。
1、 摄像头的上电、时钟这些基本条件的实现
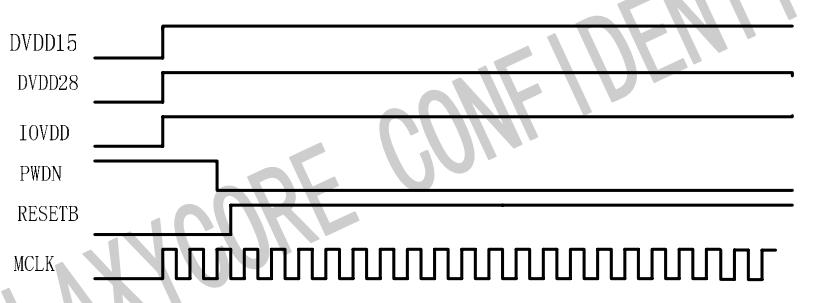
电源部分,上电时对应规格书,确认上电时序;MCLK摄像头的主时钟是否提供,看下面是和电和规格书中的
(1)、主意摄像头工作要两组电压:1.8V(1.5V)、2.8V还有MCLK
程序中对电源控制:我们在arch\arm\mach-smdkv310.c中,完成上面两个步骤的代码,(这一点不同平台也许有所不同,这里这是一个实例,这部分代码只是针对三星平台的)
- #ifdef CONFIG_VIDEO_GT2005
- static void set_cam2005_main_power(int onoff)
- {
- unsigned int gpio;
- int err;
- if(onoff)
- {
- err = gpio_request(S5PV210_GPB(2), "GPB");
- if (err)
- printk(KERN_ERR "#### failed to request GPB2 for CAM\n");
- s3c_gpio_cfgpin(S5PV210_GPB(2),S3C_GPIO_OUTPUT);
- s3c_gpio_setpull(S5PV210_GPB(2), S3C_GPIO_PULL_UP);
- gpio_direction_output(S5PV210_GPB(2), 1);
- gpio_free(S5PV210_GPB(2));
- //RESET
- err = gpio_request(S5PV210_GPE1(4), "GPE1");
- if (err)
- printk(KERN_ERR "#### failed to request GPE1_4 for CAM\n");
- s3c_gpio_setpull(S5PV210_GPE1(4), S3C_GPIO_PULL_NONE);
- gpio_direction_output(S5PV210_GPE1(4),0);
- mdelay(100);
- gpio_direction_output(S5PV210_GPE1(4), 1);
- gpio_free(S5PV210_GPE1(4));
- //PWDN CAM_back
- err = gpio_request(S5PV210_GPB(4), "GPB");
- if (err)
- printk(KERN_ERR "#### failed to request GPB4 for CAM\n");
- s3c_gpio_cfgpin(S5PV210_GPB(4),S3C_GPIO_OUTPUT);
- s3c_gpio_setpull(S5PV210_GPB(4), S3C_GPIO_PULL_UP);
- gpio_direction_output(S5PV210_GPB(4), 0);
- mdelay(100);
- gpio_direction_output(S5PV210_GPB(4), 1);
- gpio_free(S5PV210_GPB(4));
- }
- else
- {
- ………………
- }
- return;
- }
- #endif
#ifdef CONFIG_VIDEO_GT2005static void set_cam2005_main_power(int onoff){ unsigned int gpio; int err; if(onoff) { err = gpio_request(S5PV210_GPB(2), "GPB"); if (err) printk(KERN_ERR "#### failed to request GPB2 for CAM\n"); s3c_gpio_cfgpin(S5PV210_GPB(2),S3C_GPIO_OUTPUT); s3c_gpio_setpull(S5PV210_GPB(2), S3C_GPIO_PULL_UP); gpio_direction_output(S5PV210_GPB(2), 1); gpio_free(S5PV210_GPB(2)); //RESET err = gpio_request(S5PV210_GPE1(4), "GPE1"); if (err) printk(KERN_ERR "#### failed to request GPE1_4 for CAM\n"); s3c_gpio_setpull(S5PV210_GPE1(4), S3C_GPIO_PULL_NONE); gpio_direction_output(S5PV210_GPE1(4),0); mdelay(100); gpio_direction_output(S5PV210_GPE1(4), 1); gpio_free(S5PV210_GPE1(4)); //PWDN CAM_back err = gpio_request(S5PV210_GPB(4), "GPB"); if (err) printk(KERN_ERR "#### failed to request GPB4 for CAM\n"); s3c_gpio_cfgpin(S5PV210_GPB(4),S3C_GPIO_OUTPUT); s3c_gpio_setpull(S5PV210_GPB(4), S3C_GPIO_PULL_UP); gpio_direction_output(S5PV210_GPB(4), 0); mdelay(100); gpio_direction_output(S5PV210_GPB(4), 1); gpio_free(S5PV210_GPB(4)); } else { ……………… } return;}#endif
提供MCLK代码如下:
- static int smdkv210_cam_clk_init(void)
- {
- unsigned int tempvalue=0;
- tempvalue = readl(S5P_CLK_DIV1);
- tempvalue = (tempvalue &0xffff0fff);
- writel(tempvalue,S5P_CLK_DIV1);
- tempvalue = readl(S5P_CLK_SRC1);
- tempvalue = (tempvalue &0xffff0fff)|0x00001000;
- writel(tempvalue,S5P_CLK_SRC1);
- return 0;
- }
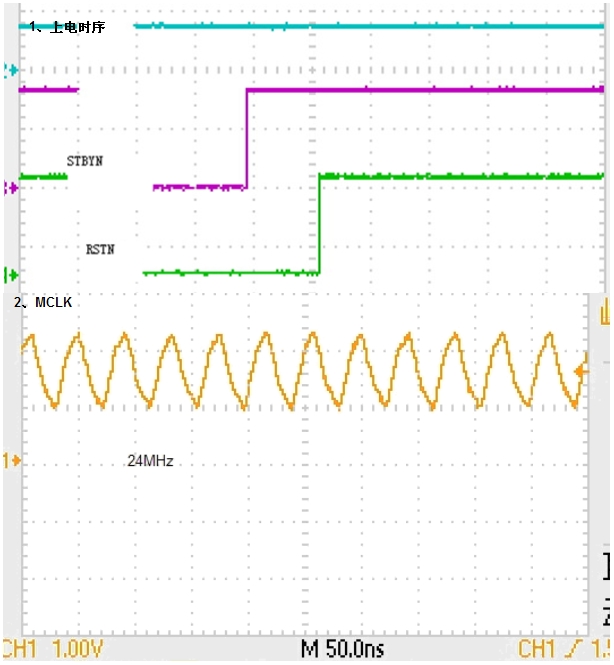
static int smdkv210_cam_clk_init(void){ unsigned int tempvalue=0; tempvalue = readl(S5P_CLK_DIV1); tempvalue = (tempvalue &0xffff0fff); writel(tempvalue,S5P_CLK_DIV1); tempvalue = readl(S5P_CLK_SRC1); tempvalue = (tempvalue &0xffff0fff)|0x00001000; writel(tempvalue,S5P_CLK_SRC1); return 0;}这时拿示波器抓到上电时的波形和MCLK24MHZ的时钟,信号就说明我们完成了这一步,其实在实际工作中,我们一般出问题的时候才会测这些数据,确认问题点。
上电时序:
(1)、上电时序;
(2)、MCLK如下所示。
2、 IIC和一些参数的配置
- #ifdef CONFIG_VIDEO_GT2005
- static struct GT2005_platform_data GT2005_plat = {
- .default_width = 640,
- .default_height = 480,
- .pixelformat = V4L2_PIX_FMT_UYVY, // .freq = 24000000,
- .is_mipi = 0,
- };
- static struct i2c_board_info GT2005_i2c_info = {
- I2C_BOARD_INFO("GT2005", 0x78 >> 1), //1、IIC地址
- .platform_data = >2005_plat,
- };
- static struct s3c_platform_camera GT2005 = {
- #ifdef CAM_ITU_CH_A
- .id = CAMERA_PAR_A,
- #else
- .id = CAMERA_PAR_B,
- #endif
- .type = CAM_TYPE_ITU, //2、数据接口选择(ITU\MIPI等)
- .fmt = ITU_601_YCBCR422_8BIT,
- .order422 = CAM_ORDER422_8BIT_CBYCRY, //3、图像数据格式
- .i2c_busnum = 1,
- .info = >2005_i2c_info,
- .pixelformat = V4L2_PIX_FMT_UYVY,
- .srclk_name = "mout_mpll", //4、这部分关系到时钟
- .clk_name = "sclk_cam1",
- .clk_rate = 24000000, /* 24MHz */
- .line_length = 640, /* 640*480 */
- /* default resol for preview kind of thing */
- .width = 640,
- .height = 480,
- .window = {
- .left = 16,
- .top = 0,
- .width = (640 - 16),
- .height = 480,
- },
- /* Polarity */ //5、信号的极性, .inv_pclk = 0,
- .inv_vsync = 1,
- .inv_href = 0,
- .inv_hsync = 1,
- .initialized = 0,
- .cam_power=set_cam2005_main_power
- };
- #endif
#ifdef CONFIG_VIDEO_GT2005static struct GT2005_platform_data GT2005_plat = { .default_width = 640, .default_height = 480, .pixelformat = V4L2_PIX_FMT_UYVY, // .freq = 24000000, .is_mipi = 0,};static struct i2c_board_info GT2005_i2c_info = { I2C_BOARD_INFO("GT2005", 0x78 >> 1), //1、IIC地址 .platform_data = >2005_plat,};static struct s3c_platform_camera GT2005 = {#ifdef CAM_ITU_CH_A .id = CAMERA_PAR_A, #else .id = CAMERA_PAR_B,#endif .type = CAM_TYPE_ITU, //2、数据接口选择(ITU\MIPI等) .fmt = ITU_601_YCBCR422_8BIT, .order422 = CAM_ORDER422_8BIT_CBYCRY, //3、图像数据格式 .i2c_busnum = 1, .info = >2005_i2c_info, .pixelformat = V4L2_PIX_FMT_UYVY, .srclk_name = "mout_mpll", //4、这部分关系到时钟 .clk_name = "sclk_cam1", .clk_rate = 24000000, /* 24MHz */ .line_length = 640, /* 640*480 */ /* default resol for preview kind of thing */ .width = 640, .height = 480, .window = { .left = 16, .top = 0, .width = (640 - 16), .height = 480, }, /* Polarity */ //5、信号的极性, .inv_pclk = 0, .inv_vsync = 1, .inv_href = 0, .inv_hsync = 1, .initialized = 0, .cam_power=set_cam2005_main_power};#endif注意下面几个参数:
(1)、IIC地址
(2)、数据接口选择(ITU\MIPI等),这几个数据接口我们在前面提到过;
(3)、图像数据格式 ,这就是我们前面提到的YVU\UVY之类不同的数据顺序;
(4)、这部分关系到时钟;
(5)、输出信号的极性,就是我们PCLK、VSYNC、HSVNC这些信号的极性,不正确时会没有图像之类现象,这个也要注意了。
完成这一步确认IIC通信是否正常,如下图所抓到波形:

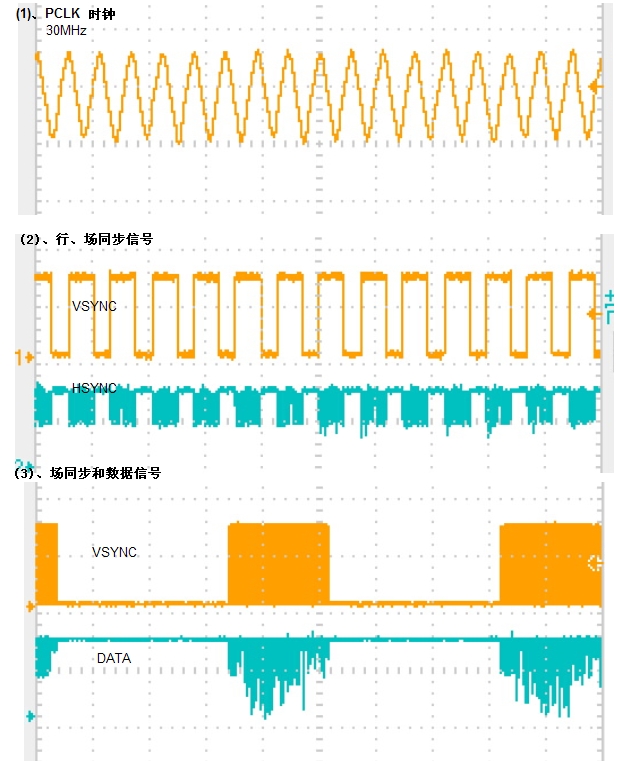
3、 完成上面两步,摄像头基本配置完成,我们确认下输出端PCLK、VHSN、SVSN、D1-D7
二、摄像头调试过程中常遇到的问题
1、录相在预览时正常,播放录像时花屏(程序解释为三星s5pv210/s5pv310是的,其它的可以参考,找相应代码)

原因分析:
(1)录相用fimc2,
在android/device/samsung/proprietary/libcamera/SecCamera.cpp中
int SecCamera::startRecord(void)
- m_cam_fd_rec = open(CAMERA_DEV_NAME2, O_RDWR);
- vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.h
- #define CAMERA_DEV_NAME2 "/dev/video2"
m_cam_fd_rec = open(CAMERA_DEV_NAME2, O_RDWR);vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.h#define CAMERA_DEV_NAME2 "/dev/video2"(2)所用的视频格式,在
android/device/samsung/proprietary/libcamera/SecCameraHWInterface.cpp中
void CameraHardwareSec::m_initDefaultParameters(int camera_id)
- int default_preview_pixel_format = mSecCamera->getPreviewDefaultPixelFormat();
- switch (default_preview_pixel_format) {
- default:
- case V4L2_PIX_FMT_NV21:
- p.setPreviewFormat(CameraParameters::PIXEL_FORMAT_YUV420SP);
- break;
- case V4L2_PIX_FMT_NV12T:
- p.setPreviewFormat("yuv420sp_tiled");
- break;
- }
- 其中mSecCamera->getPreviewDefaultPixelFormat()在
- vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.cpp中实现,
- int SecCamera::getPreviewDefaultPixelFormat(void)
- {
- return DEFAULT_PREVIEW_PIXEL_FORMAT;
- }
- 在android/device/samsung/proprietary/libcamera/SecCamera.h中设定初始值。我们这里设的是
- #ifdef DUAL_PORT_RECORDING
- #define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV21)
- #else
- #define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV12T)
- #endif
int default_preview_pixel_format = mSecCamera->getPreviewDefaultPixelFormat(); switch (default_preview_pixel_format) { default: case V4L2_PIX_FMT_NV21: p.setPreviewFormat(CameraParameters::PIXEL_FORMAT_YUV420SP); break; case V4L2_PIX_FMT_NV12T: p.setPreviewFormat("yuv420sp_tiled"); break; }其中mSecCamera->getPreviewDefaultPixelFormat()在vendor\sec\sec_proprietary\smdkc110\libcamera\SecCamera.cpp中实现,int SecCamera::getPreviewDefaultPixelFormat(void){ return DEFAULT_PREVIEW_PIXEL_FORMAT;}在android/device/samsung/proprietary/libcamera/SecCamera.h中设定初始值。我们这里设的是#ifdef DUAL_PORT_RECORDING #define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV21)#else #define DEFAULT_PREVIEW_PIXEL_FORMAT (V4L2_PIX_FMT_NV12T)#endif以上得出视频格式为V4L2_PIX_FMT_NV21。
2、图像干扰问题,如下图所示

原因可能是:
(1)、摄像头模组有问题,换一个摄像头试一下;
(2)、数据线驱动能力不足,这个可以在摄像头寄存器里面改,问下摄像头模组FAE,看改那些地方;
(3)、两个摄像头共用数据线时,不工作的摄像头会把工作的数据信号减弱;
(4)、PCB 走线太长,也会有干扰,不过我觉得这个可能性小,调试好就一款这样的的,模组厂FAE说的,不过他们模组本身也有问题,两方面因素都有吧:PCB(线过长)、模组打样也有问题。
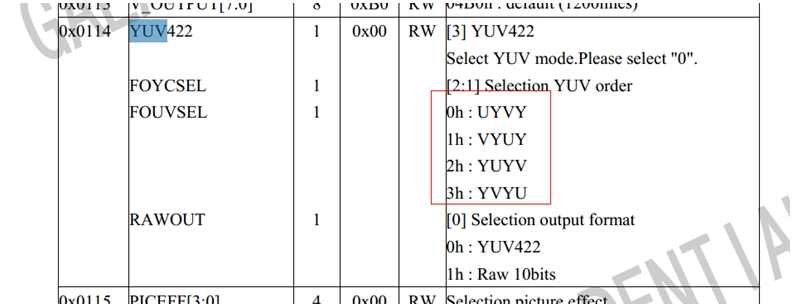
3、YUV顺序不对:
yuv顺序不对时,出现如下现象。

看下摄像头规格书,把相应寄存器的值改一下就可以了。如下以红框里是不同yuv顺序,找到改为相应的。
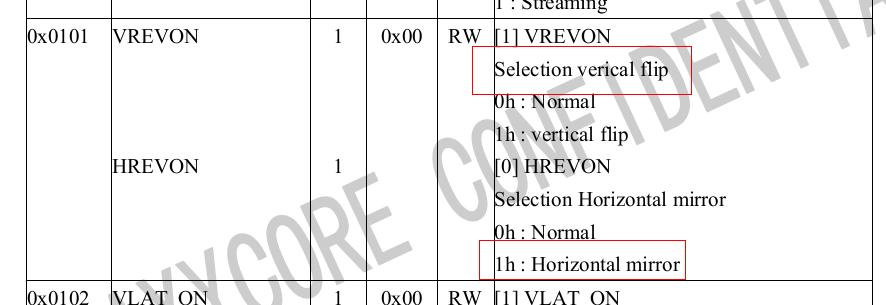
4、 预览方向不对(摄像头寄存器只能改以 180度为基数的,90度的就要在FIMC中改)
想知道和比较明确说明翻转角度,最常用的就是写一个“F”,然后看预览里的是怎么转的。
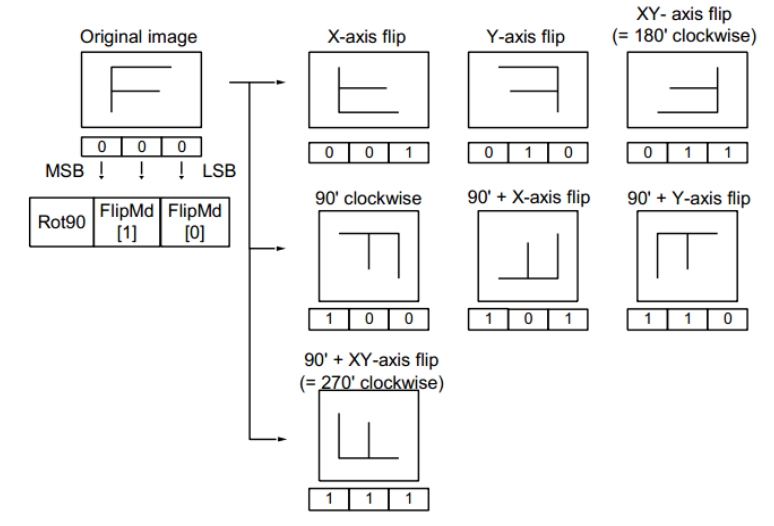
上面有90度的翻转,因为这是FIMC中的寄存器,一般不会改这一部分的值。要不就在模组寄存器中改,要不就在上层。上面只是说明如何去确认图像翻转。
看下GT2005关于翻转的寄存器吧:
5、 杂光,鬼影:
其行业的专业术语统称为Flare,是指在拍摄光源或者强光物体时,边缘出现光影或出现一个完整物体的影子,而且这种现象只能减轻不能完全消失,原因是由于镜片的材质导致光线不但存在折射还存在反射,整机由于镜头面到保护镜片距离很大会更明显! 
6、 常见问题相关
摄像头效果评测都有哪些? 
以上以gt2005为例,说了一下摄像头驱动,和驱动中常见到的问题,如果上面的问题解决,摄像头点亮,说明在平台是运行是没问题的,小的问题和细节,要找模组厂的FAE过来协助解决,不过你想多研究一下的话,也可以,如果项目允许,就多看看,做到调试一个驱动,所有问题都了解,这样对工作经验、积累很重要的,希望对大家有用。
|
|




 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2013-11-26 09:06:56
发表于 2013-11-26 09:06:56
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 楼主
楼主 发表于 2015-10-15 00:26:19
发表于 2015-10-15 00:26:19












 |站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网-摄像头方案网CCM99
( 粤ICP备18155214号 )
|站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网-摄像头方案网CCM99
( 粤ICP备18155214号 )