|
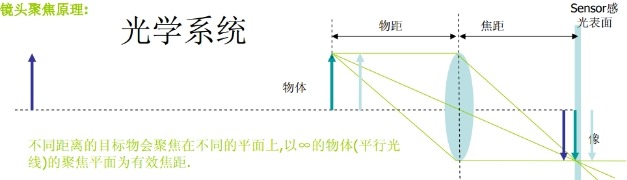
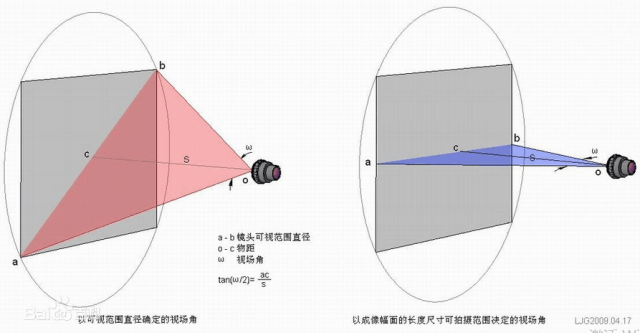
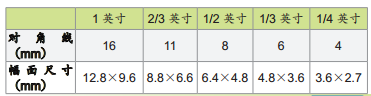
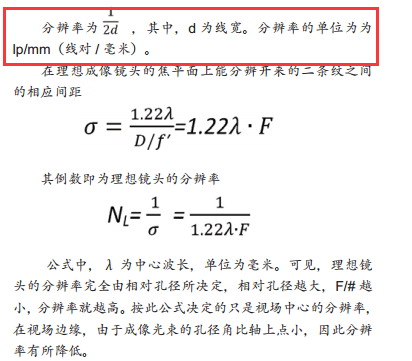
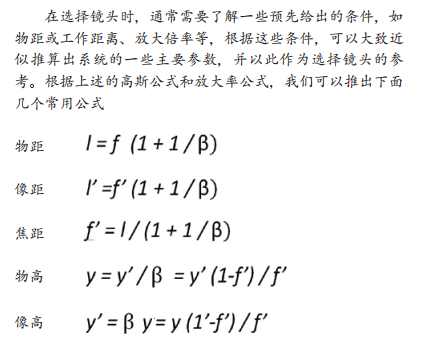
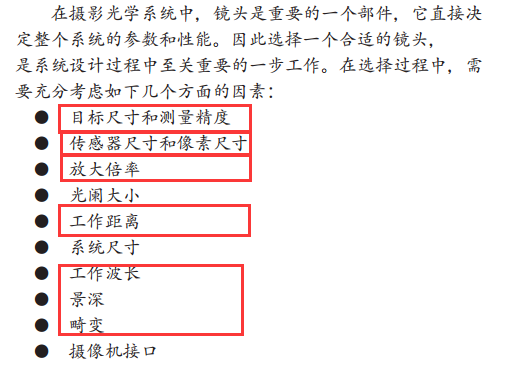
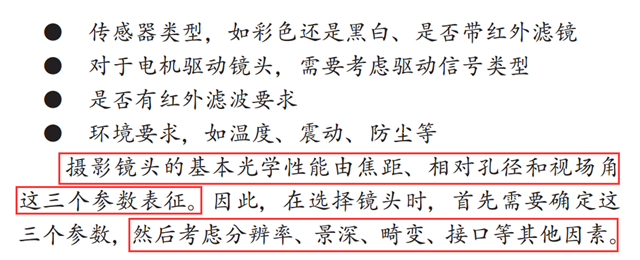
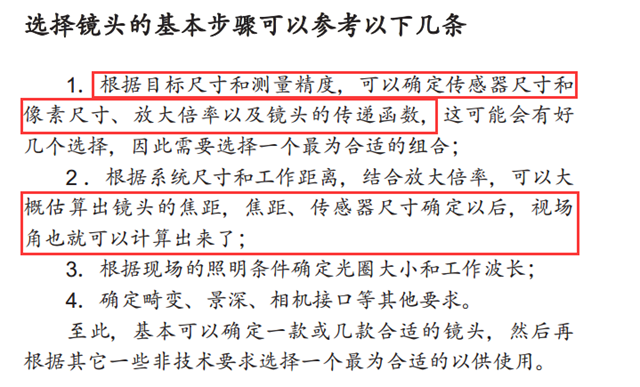
花了几天时间,将视频采集+图像处理的板卡交给工厂去做了,接下来等待板子归来,然后写驱动程序,将硬件插到PC端,进行驱动的安装调试,这一切若是顺利的话,剩下的问题就是上位机和摄像头驱动了。摄像头驱动之前有弄过,上位机想想就头疼,不打算自己做了,到时找个大神帮我做一个,可能分分钟就搞定。 本篇博客介绍一下摄像头相关的知识。 对于摄像头而言,最重要的有三个参数:焦距f,最大相对孔径D/f,视场角2w。这三个参数确定之后,在考虑分辨率,景深,畸变,接口等因素。 焦距f 反映了一个光学系统对光线的会聚能力,决定了成像的大小。焦距是指从焦点到镜头中心的距离,每只镜头的都有固定或变化的焦距,用大写字母F表示。如下图所示 F20,表明这个镜头的焦距是20mm,F28-70,表明这个镜头的焦距是28mm~70mm,可变焦镜头。 最大相对孔径 镜头最大相对孔径,用来描述镜头的光透能力,镜头的最大相对孔径越大,光线透过量越大。镜头最大相对孔径用能穿过镜头的圆柱形光束直径D与镜头焦距f之比表示,即D/f。如F20mm、1:2表明镜头最大相对孔径是镜头焦距的二分之一。镜头最大相对孔径大,进光量多,通光能力强。为了满足在较暗时摄影的需要,或者为了高速运动物体摄影,要求采用很短的曝光时间,提高像面的照度。 最大相对孔径大小决定了镜头的分辨率,像面照度和成像质量。为了控制通过镜头的光通量大小,需要在镜头的后部设置光圈,F表示,F为相对孔径的倒数。F越大,孔径越小,F越小,镜头的使用范围越小,从而调节进光量和像面上的照度。F的标值为1.4/2/2.8/4/5.6/8/11/16/22等序列值。F越小,到达摄像头靶面的光通量就越大。 视场角 视场角分为物方视场角和像方视场角。关心的是物方视场角。光学仪器以成像物的直径作为视场角计算,对于传感器,由于其感光面为矩形,因此常以矩形感光面的对角线的成像物直径计算视场角。 镜头的视场角是指摄像管的有效成像平面边缘与镜头后节点所形成的夹角。决定了被拍摄景物的范围。用2w表示。当镜头焦距一定的时候,视场角越大,成像也越大。视场角与焦距之间的关系如下: y = f *tanw; 其中y为像面区域的直径。 若是焦距短,那么视场角大,成像也大,若是焦距长,视场角减小,成像小。 对于长焦距的镜头只能有较小的视场角,对远处的景物拍摄比较大的像,适宜于远距离摄影。短焦距的镜头有较大的视场角,能将近处较大范围内的景物摄入像面,又称为广角镜头,视场角更大 线阵和面阵传感器区别 工业相机所使用的感光传感器主要有CCD或CMOS传感器,分为面阵和线阵两种。其工作区域分为矩形或线形。传感器的工作区域必须包含在镜头确定的像面圆形区域内。 面阵传感器是由许多像素元组成的一个矩形阵列,每个像素单元都是一个方形传感器。常用的传感器大小如下图所示: 线阵传感器的像素单元排成一列,有1K,2K,4K,8K,12K,像素单元有5μm,7μm,10μm,14μm等。 工作波长  分辨率 分辨率 分辨率是评价镜头的一个重要参数。定义为在像面处镜头在单位毫米内能够分辨开的黑白相间的条纹对数,如下图所示: 分辨率分为镜头分辨率和像元分辨率,最终的成像质量是由像元分辨率决定的。在实际使用中,由于景深的存在,所以一般会使镜头的分辨率高于像元的分辨率。 畸变 在视场角较大时,会出现 像相对于物体失去近似性,这种使成像变形称为畸变。 景深 工作距离 光学系统一些计算公式 镜头选择参数 选择镜头的一些参数
| 



 窥视卡
窥视卡 雷达卡
雷达卡 发表于 2017-2-22 17:34:42
发表于 2017-2-22 17:34:42






 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡 发表于 2017-4-13 15:52:49
发表于 2017-4-13 15:52:49












 |站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网-摄像头方案网CCM99
( 粤ICP备18155214号 )
|站点统计|小黑屋|手机版|Archiver|摄像头模组论坛网-摄像头方案网CCM99
( 粤ICP备18155214号 )